Virtual reality wind device
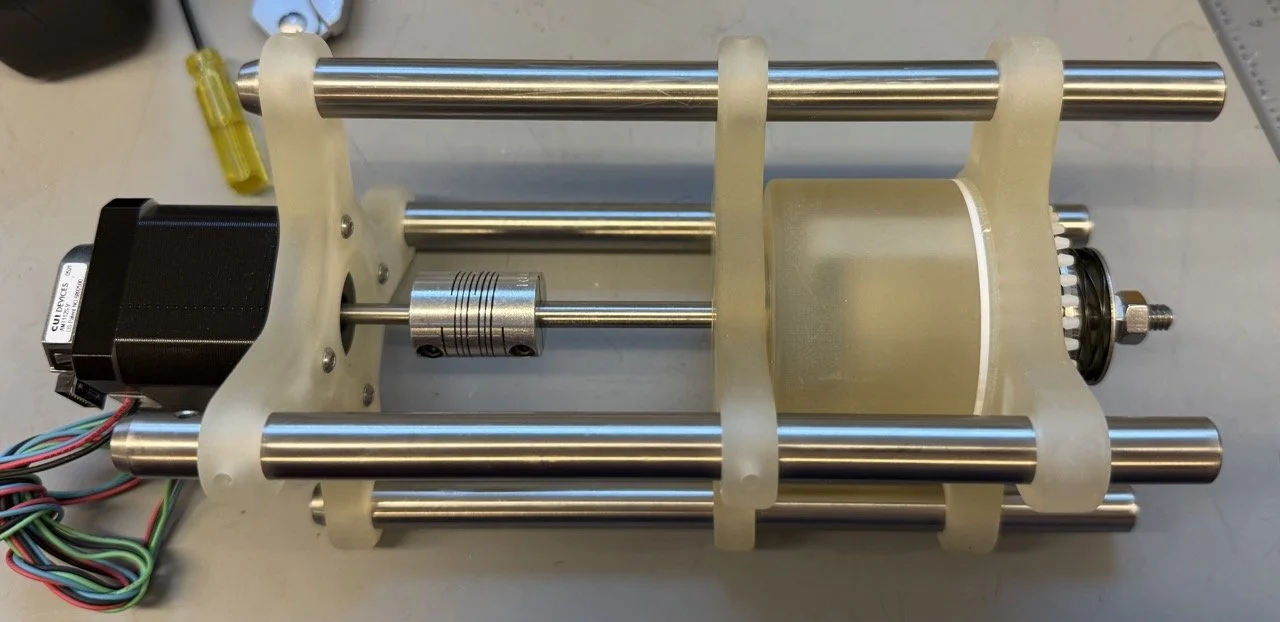
We needed to deliver wind from smoothly varying angles around a tethered fly in virtual reality, without anything in the fly’s vision moving. We had an initial device that mostly worked, but had lots of problems with airspeed consistency, and leaking due to many features of the old design. I did a complete redesign of the device from the ground up, making it much more reliable and robust.
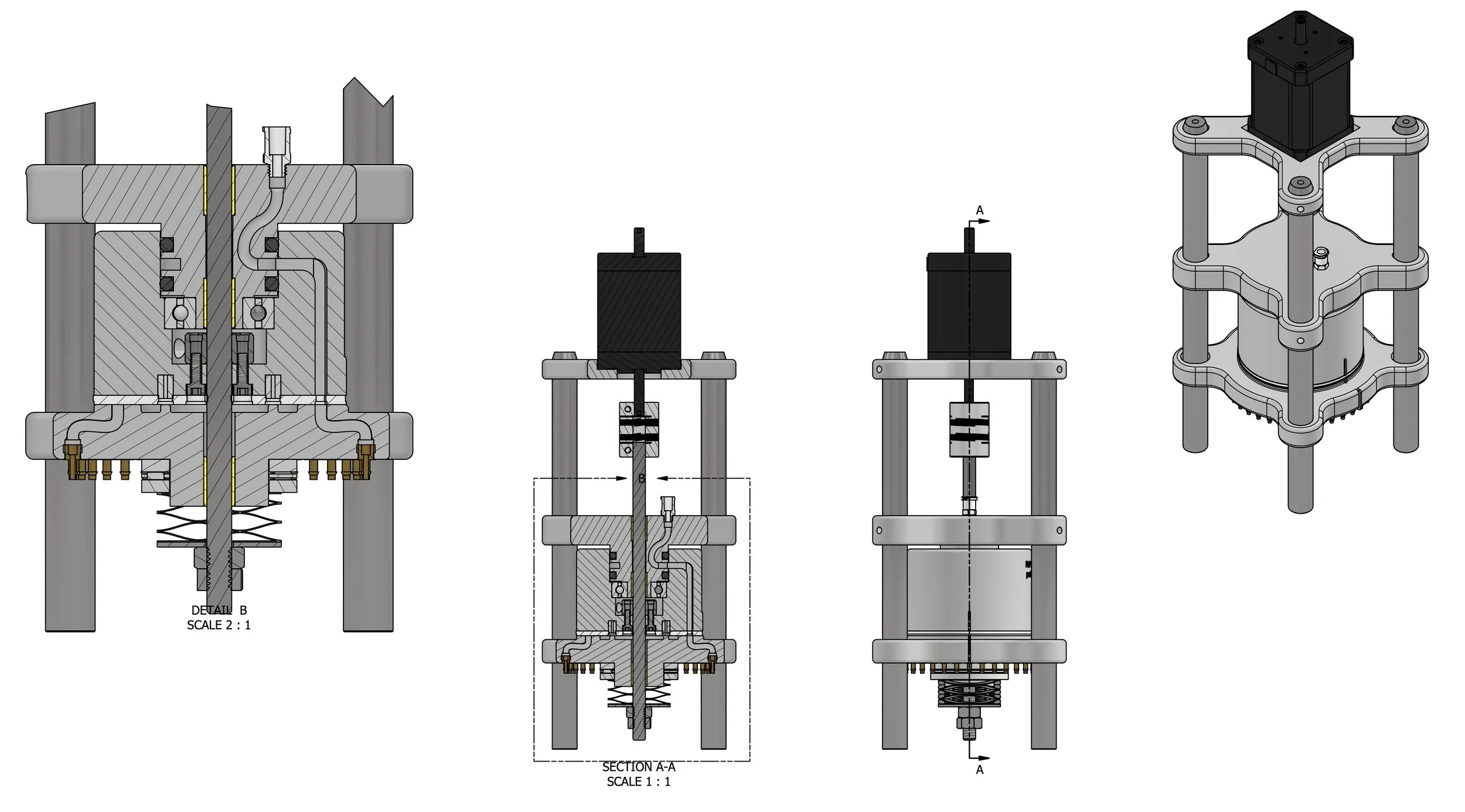
The new design has all of the rotating parts mounted concentrically on a shaft, with sleeve- and ball-bearings to maintain concentricity during rotation. An expanded PTFE gasket creates a low friction sliding seal, and a stacked wave spring maintains even pressure on this seal.
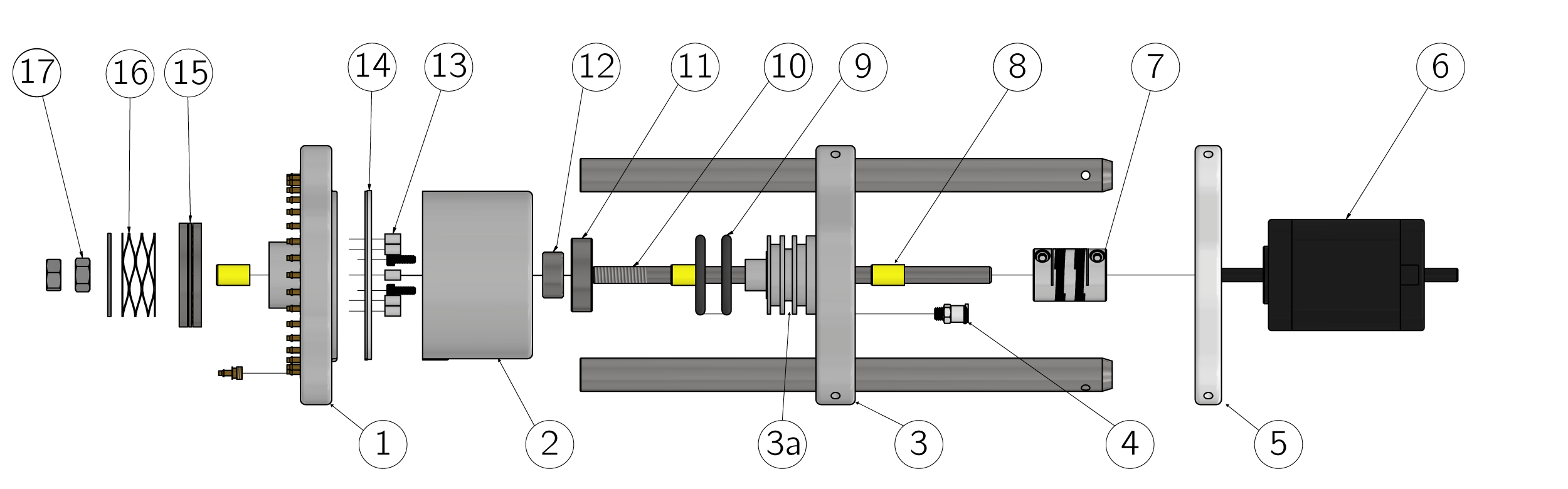
Rotary motion is controlled by a stepper motor (6) with an absolute rotary encoder and attached to the motor mount (5). It is coupled to a 1/4” partially threaded shaft (10) by a flexible coupling (7). This shaft is held concentric in the stator pieces with sleeve bearings (8), and coupled to the rotor with a shaft collar (12). The rotor is held concentric with the stator top with a precision ball bearing (11).
Air comes from the inlet (4) into the stator top piece (3). Then through the annular plenum (3a), sealed by o-rings (9), it passes into the rotor (2). An internal tube in the rotor transfers air to a subset of the output tubes in the bottom stator (1). The interface between these pieces is sealed with an expanded PTFE gasket (14) that is registered to turn with the rotor by pins (13). This seal is compressed by a stacked wave spring (16) compressed by two nuts (17), and pressing through a thrust bearing (15).
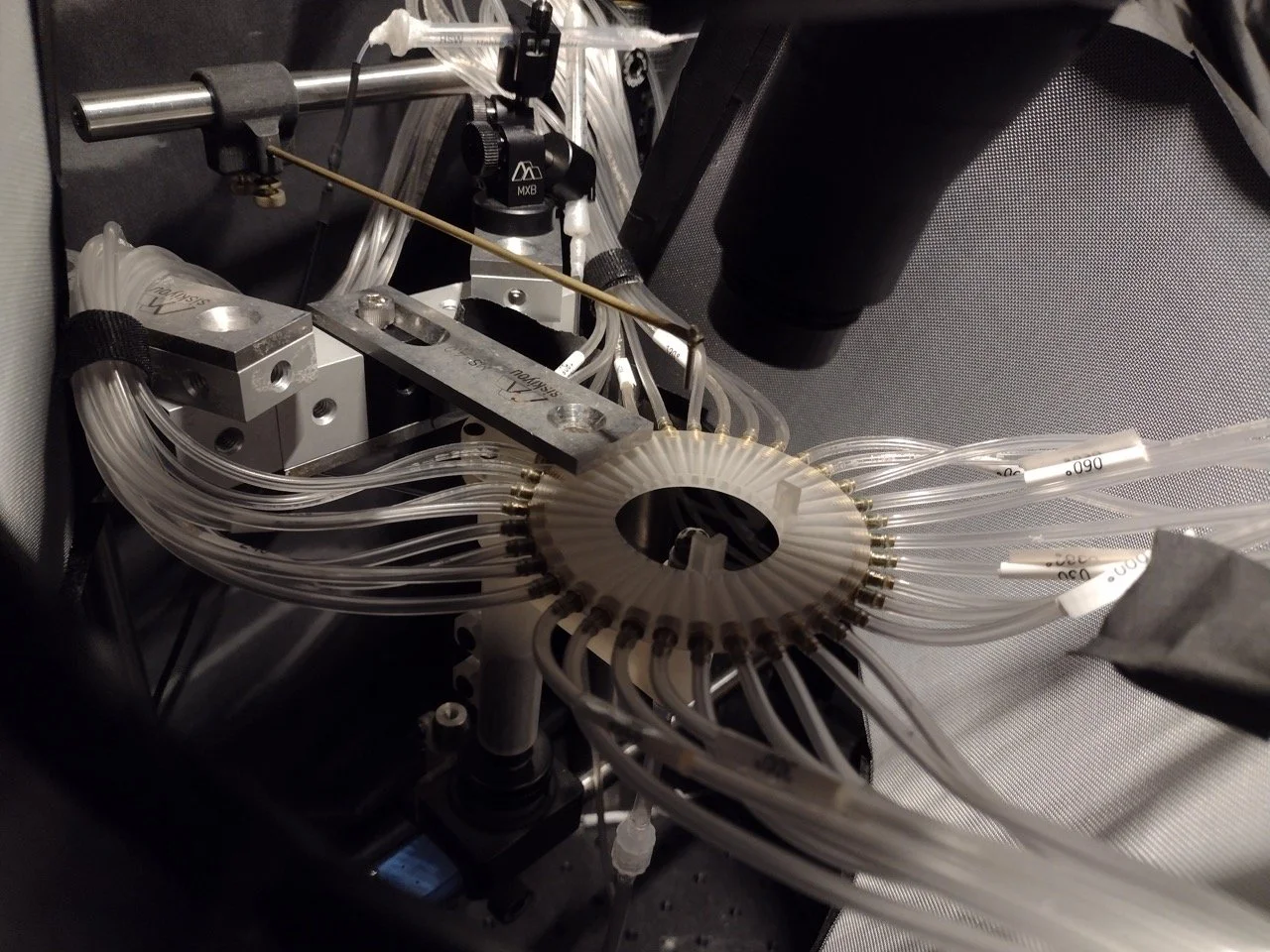
Wind comes to the fly from 36 tubes aranged around 360 degrees of azimuth